


如果你曾经处理过金融市场数据,一定会遇到这样一个问题:我们看到的市场价格真的是"真实价格"吗?
答案是:不完全是。市场价格包含了各种噪声,比如买卖价差、随机小额交易、延迟以及市场微观结构等因素。那么,如何从嘈杂的市场数据中提取出隐藏的"真实价格"呢?
卡尔曼滤波器(Kalman Filter)正是解决这个问题的利器。它不是简单的平滑算法,而是一个基于模型的估计系统,能够在每个时间步动态调整对数据的"信任程度"。
本文将带你用 Python 一步步实现卡尔曼滤波器,估算股票的高效价格。
卡尔曼滤波器的核心思想
卡尔曼滤波器基于两条规则建立模型:
规则一:隐藏的真实价格逐步变化
真实的对数价格是一个隐藏状态,它随时间发生小幅随机变化。这种随机性由参数 Q(过程噪声)控制。
规则二:市场价格 = 真实价格 + 噪声
我们观察到的对数价格等于真实对数价格加上额外的测量噪声。这种噪声由参数 R(观测噪声)控制。
整个算法不断重复一个循环:预测 → 更新 → 预测 → 更新 ……
第一步:创建模拟市场数据
首先,我们生成一组模拟的市场数据,包括隐藏的"真实价格"和带噪声的"观测价格":
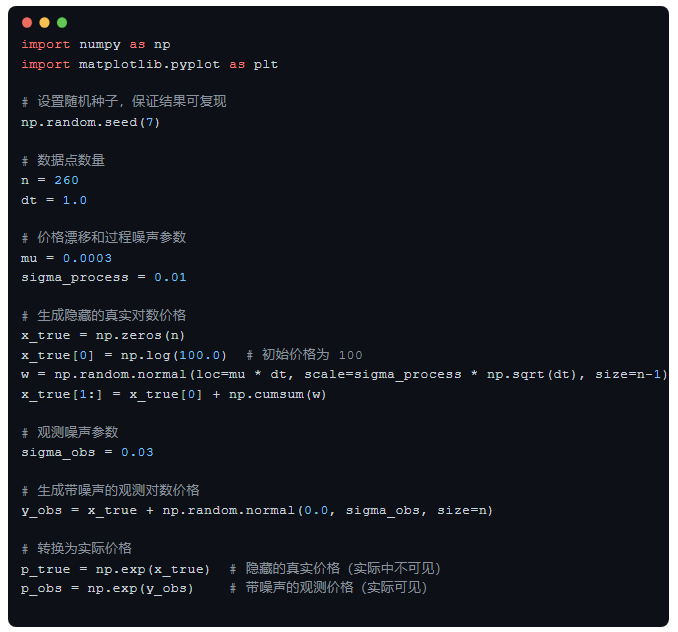
在这段代码中,p_true 是我们希望估算的干净价格路径(在现实中是隐藏的),而 p_obs 是我们实际能获取的带噪声市场价格。
第二步:实现卡尔曼滤波器
卡尔曼滤波器的核心代码非常简洁,但功能强大:
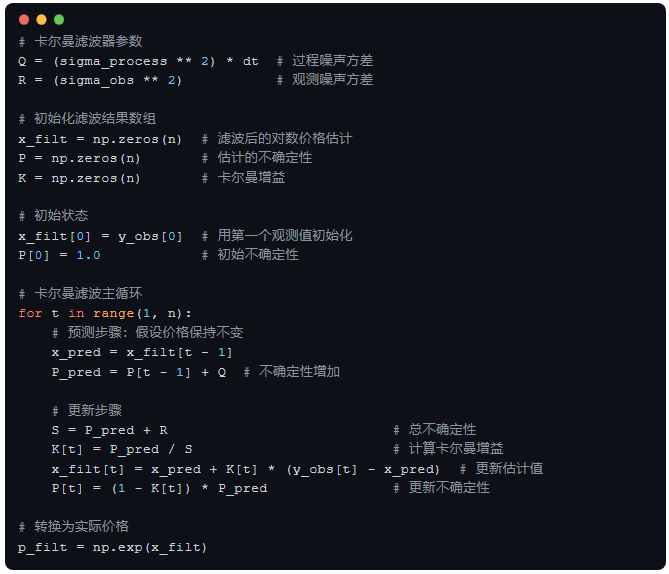
卡尔曼增益:动态的"信任滑块"
卡尔曼增益 K 是整个算法的核心概念,它决定了我们在多大程度上信任新的观测数据:
- • 如果市场噪声很大(R 较大):滤波器更信任模型预测,K 变小,滤波后的价格更平滑
- • 如果模型不确定性很高(P_pred 较大):滤波器更信任观测数据,K 变大,对新数据反应更快
这就是为什么卡尔曼滤波器比简单的移动平均更像一个真正的机器学习模型——它在模型预测和新观测之间动态调整信任程度。
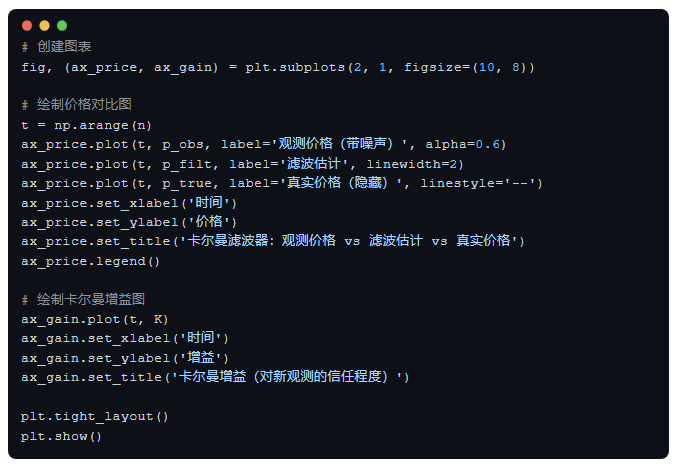
第三步:可视化结果
让我们把观测价格、滤波估计和真实价格绑定在一起进行可视化:
实际应用场景
一旦你有了滤波后的价格估计,就可以将其应用于多种数据科学场景:
- • 使用滤波后的价格而非原始价格来计算收益率和特征
- • 将"创新项"(观测值 − 预测值)作为"意外事件"特征
- • 将 P(不确定性)作为风险感知输入
- • 将 K(增益)作为市场状态或噪声信号
相比移动平均等传统方法,卡尔曼滤波器能够在减少微观噪声的同时,避免引入较大的滞后。
总结
卡尔曼滤波器是一个小巧但强大的模型,通过不断重复"预测 → 更新"的循环,从带噪声的市场观测中估算隐藏的"真实价格"。
它的优势在于:不仅能给出平滑的价格曲线,还能提供实时的信任度量(卡尔曼增益)和不确定性估计。通过调整 Q 和 R 参数,你可以控制滤波器的"个性"——是更相信模型还是更相信数据。
对于学习 Python 和量化金融的同学来说,卡尔曼滤波器是一个非常值得掌握的工具,它在信号处理、目标追踪、时间序列分析等领域都有广泛应用。
以上就是“用 Python 实现卡尔曼滤波器,估算股票的真实价格!”的详细内容,想要了解更多Python教程欢迎持续关注编程学习网。
扫码二维码 获取免费视频学习资料

- 本文固定链接: http://www.phpxs.com/post/13968/
- 转载请注明:转载必须在正文中标注并保留原文链接
- 扫码: 扫上方二维码获取免费视频资料