

1. 锁的基础概念
1.1 CAS与轮询
1.1.1 cas实现锁
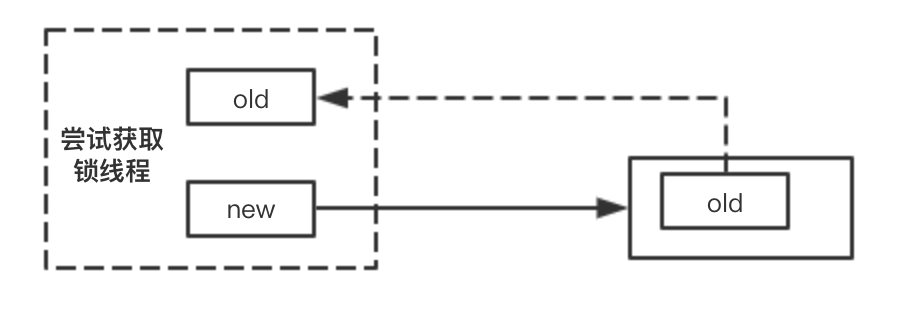
在锁的实现中现在越来越多的采用CAS来进行,通过利用处理器的CAS指令来实现对给定变量的值交换来进行锁的获取
1.1.2 轮询锁
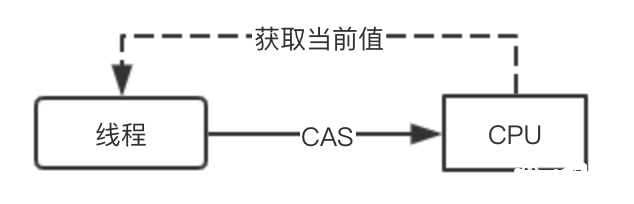
在多线程并发的情况下很有可能会有线程CAS失败,通常就会配合for循环采用轮询的方式去尝试重新获取锁
1.2 锁的公平性

锁从公平性上通常会分为公平锁和非公平锁,主要取决于在锁获取的过程中,先进行锁获取的线程是否比后续的线程更先获得锁,如果是则就是公平锁:多个线程按照获取锁的顺序依次获得锁,否则就是非公平性
1.3 饥饿与排队
1.3.1 锁饥饿
锁饥饿是指因为大量线程都同时进行获取锁,某些线程可能在锁的CAS过程中一直失败,从而长时间获取不到锁
1.3.2 排队机制
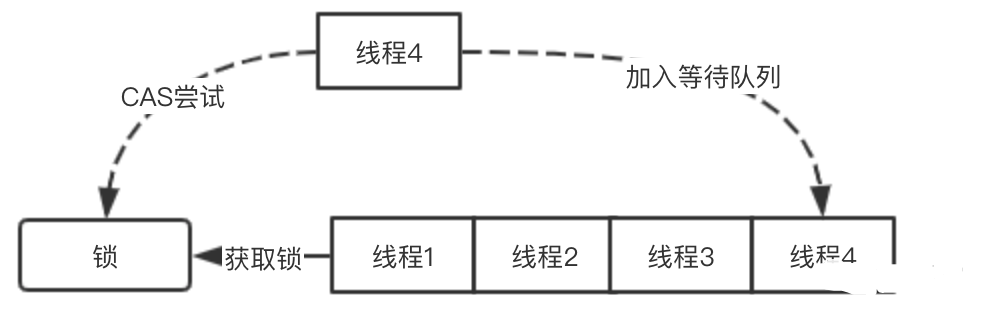
上面提到了CAS和轮询锁进行锁获取的方式,可以发现如果已经有线程获取了锁,但是在当前线程在多次轮询获取锁失败的时候,就没有必要再继续进行反复尝试浪费系统资源,通常就会采用一种排队机制,来进行排队等待
1.4 位计数
在大多数编程语言中针对实现基于CAS的锁的时候,通常都会采用一个32位的整数来进行锁状态的存储
2. mutex实现
2.1 成员变量与模式
2.1.1 成员变量
在go的mutex中核心成员变量只有两个state和sema,其通过state来进行锁的计数,而通过sema来实现排队
type Mutex struct { state int32 sema uint32 }
2.1.2 锁模式
锁模式主要分为两种
|
|
描述 | 公平性 |
|---|---|---|
| 正常模式 | 正常模式下所有的goroutine按照FIFO的顺序进行锁获取,被唤醒的goroutine和新请求锁的goroutine同时进行锁获取,通常新请求锁的goroutine更容易获取锁 | 否 |
| 饥饿模式 | 饥饿模式所有尝试获取锁的goroutine进行等待排队,新请求锁的goroutine不会进行锁获取,而是加入队列尾部等待获取锁 | 是 |
上面可以看到其实在正常模式下,其实锁的性能是最高的如果多个goroutine进行锁获取后立马进行释放则可以避免多个线程的排队消耗同理在切换到饥饿模式后,在进行锁获取的时候,如果满足一定的条件也会切换回正常模式,从而保证锁的高性能
2.2 锁计数
2.2.1 锁状态
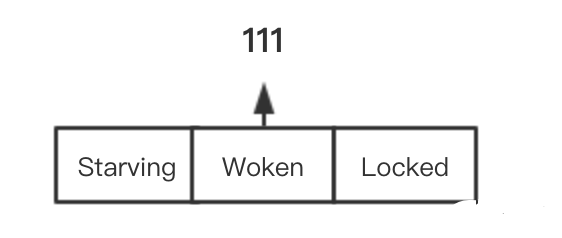
在mutex中锁有三个标志位,其中其二进制位分别位001(mutexLocked)、010(mutexWoken)、100(mutexStarving), 注意这三者并不是互斥的关系,比如一个锁的状态可能是锁定的饥饿模式并且已经被唤醒
mutexLocked = 1 << iota // mutex is locked mutexWoken mutexStarving
2.2.2 等待计数
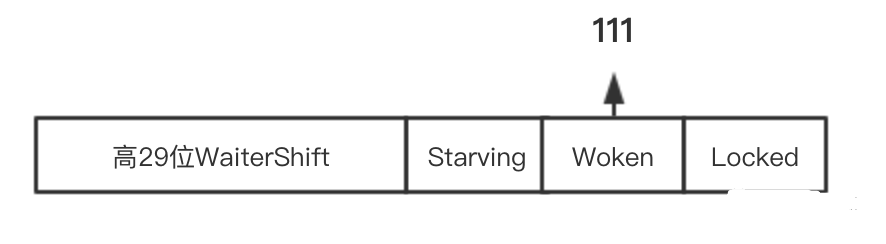
mutex中通过低3位存储了当前mutex的三种状态,剩下的29位全部用来存储尝试正在等待获取锁的goroutine的数量
mutexWaiterShift = iota // 3
2.3唤醒机制
2.3.1 唤醒标志
唤醒标志其实就是上面说的第二位,唤醒标志主要用于标识当前尝试获取goroutine是否有正在处于唤醒状态的,记得上面公平模式下,当前正在cpu上运行的goroutine可能会先获取到锁
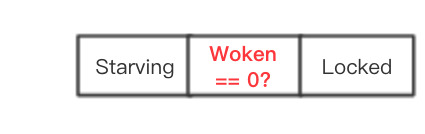
2.3.2 唤醒流程
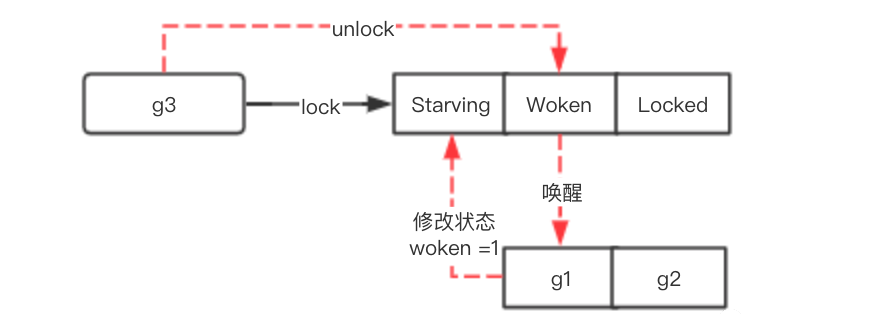
当释放锁的时候,如果当前有goroutine正在唤醒状态,则只需要修改锁状态为释放锁,则处于woken状态的goroutine就可以直接获取锁,否则则需要唤醒一个goroutine, 并且等待这个goroutine修改state状态为mutexWoken,才退出
2.4 加锁流程
2.3.1 快速模式
如果当前没有goroutine加锁,则并且直接进行CAS成功,则直接获取锁成功
// Fast path: grab unlocked mutex. if atomic.CompareAndSwapInt32(&m.state, 0, mutexLocked) { if race.Enabled { race.Acquire(unsafe.Pointer(m)) } return }
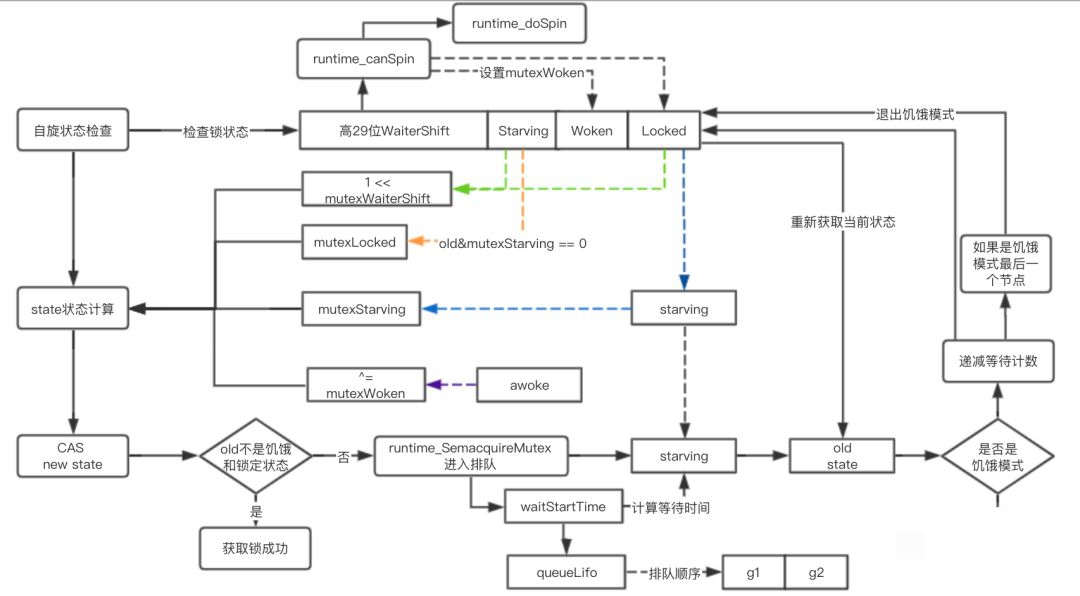
2.3.2 自旋与唤醒
// 注意这里其实包含两个信息一个是如果当前已经是锁定状态,然后允许自旋iter主要是计数次数实际上只允许自旋4次 // 其实就是在自旋然后等待别人释放锁,如果有人释放锁,则会立刻进行下面的尝试获取锁的逻辑 if old&(mutexLocked|mutexStarving) == mutexLocked && runtime_canSpin(iter) { // !awoke 如果当前线程不处于唤醒状态 // old&mutexWoken == 0如果当前没有其他正在唤醒的节点,就将当前节点处于唤醒的状态 // old>>mutexWaiterShift != 0 :右移3位,如果不位0,则表明当前有正在等待的goroutine // atomic.CompareAndSwapInt32(&m.state, old, old|mutexWoken)设置当前状态为唤醒状态 if !awoke && old&mutexWoken == 0 && old>>mutexWaiterShift != 0 && atomic.CompareAndSwapInt32(&m.state, old, old|mutexWoken) { awoke = true } // 尝试自旋, runtime_doSpin() // 自旋计数 iter++ // 从新获取状态 old = m.state continue }
2.3.3 更改锁状态
流程走到这里会有两种可能:1.锁状态当前已经不是锁定状态2.自旋超过指定的次数,不再允许自旋了
new := old if old&mutexStarving == 0 { // 如果当前不是饥饿模式,则这里其实就可以尝试进行锁的获取了|=其实就是将锁的那个bit位设为1表示锁定状态 new |= mutexLocked } if old&(mutexLocked|mutexStarving) != 0 { // 如果当前被锁定或者处于饥饿模式,则增等待一个等待计数 new += 1 << mutexWaiterShift } if starving && old&mutexLocked != 0 { // 如果当前已经处于饥饿状态,并且当前锁还是被占用,则尝试进行饥饿模式的切换 new |= mutexStarving } if awoke { if new&mutexWoken == 0 { throw("sync: inconsistent mutex state") } // awoke为true则表明当前线程在上面自旋的时候,修改mutexWoken状态成功 // 清除唤醒标志位 // 为什么要清除标志位呢? // 实际上是因为后续流程很有可能当前线程会被挂起,就需要等待其他释放锁的goroutine来唤醒 // 但如果unlock的时候发现mutexWoken的位置不是0,则就不会去唤醒,则该线程就无法再醒来加锁 new &^= mutexWoken }
2.3.3 加锁排队与状态转换
再加锁的时候实际上只会有一个goroutine加锁CAS成功,而其他线程则需要重新获取状态,进行上面的自旋与唤醒状态的重新计算,从而再次CAS
if atomic.CompareAndSwapInt32(&m.state, old, new) { if old&(mutexLocked|mutexStarving) == 0 { // 如果原来的状态等于0则表明当前已经释放了锁并且也不处于饥饿模式下 // 实际的二进制位可能是这样的 1111000, 后面三位全是0,只有记录等待goroutine的计数器可能会不为0 // 那就表明其实 break // locked the mutex with CAS } // 排队逻辑,如果发现waitStatrTime不为0,则表明当前线程之前已经再排队来,后面可能因为 // unlock被唤醒,但是本次依旧没获取到锁,所以就将它移动到等待队列的头部 queueLifo := waitStartTime != 0 if waitStartTime == 0 { waitStartTime = runtime_nanotime() } // 这里就会进行排队等待其他节点进行唤醒 runtime_SemacquireMutex(&m.sema, queueLifo) // 如果等待超过指定时间,则切换为饥饿模式 starving=true // 如果一个线程之前不是饥饿状态,并且也没超过starvationThresholdNs,则starving为false // 就会触发下面的状态切换 starving = starving || runtime_nanotime()-waitStartTime > starvationThresholdNs // 重新获取状态 old = m.state if old&mutexStarving != 0 { // 如果发现当前已经是饥饿模式,注意饥饿模式唤醒的是第一个goroutine // 当前所有的goroutine都在排队等待 // 一致性检查, if old&(mutexLocked|mutexWoken) != 0 || old>>mutexWaiterShift == 0 { throw("sync: inconsistent mutex state") } // 获取当前的模式 delta := int32(mutexLocked - 1<<mutexWaiterShift) if !starving || old>>mutexWaiterShift == 1 { // 如果当前goroutine不是饥饿状态,就从饥饿模式切换会正常模式 // 就从mutexStarving状态切换出去 delta -= mutexStarving } // 最后进行cas操作 atomic.AddInt32(&m.state, delta) break } // 重置计数 awoke = true iter = 0 } else { old = m.state }
2.5 释放锁逻辑
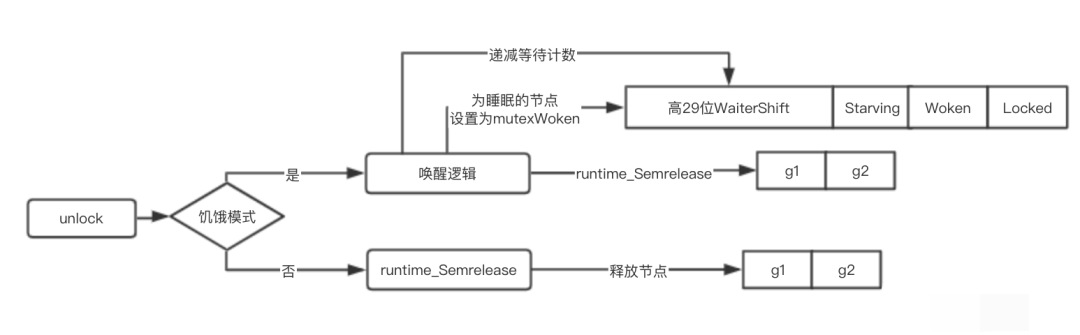
2.5.1 释放锁代码
func (m *Mutex) Unlock() { if race.Enabled { _ = m.state race.Release(unsafe.Pointer(m)) } // 直接进行cas操作 new := atomic.AddInt32(&m.state, -mutexLocked) if (new+mutexLocked)&mutexLocked == 0 { throw("sync: unlock of unlocked mutex") } if new&mutexStarving == 0 { // 如果释放锁并且不是饥饿模式 old := new for { if old>>mutexWaiterShift == 0 || old&(mutexLocked|mutexWoken|mutexStarving) != 0 { // 如果已经有等待者并且已经被唤醒,就直接返回 return } // 减去一个等待计数,然后将当前模式切换成mutexWoken new = (old - 1<<mutexWaiterShift) | mutexWoken if atomic.CompareAndSwapInt32(&m.state, old, new) { // 唤醒一个goroutine runtime_Semrelease(&m.sema, false) return } old = m.state } } else { // 唤醒等待的线程 runtime_Semrelease(&m.sema, true) } }
扫码二维码 获取免费视频学习资料

- 本文固定链接: http://www.phpxs.com/post/7104/
- 转载请注明:转载必须在正文中标注并保留原文链接
- 扫码: 扫上方二维码获取免费视频资料